
 庞小涵 ·2019/11/7
庞小涵 ·2019/11/7
21世纪的今天,机器人离我们的生活越来越近,越来越多的工作正在被机器人所取代,同时也让很多人感到焦虑,焦虑的是自己的工作如何才能不被机器人所取代呢?我觉得,解决这个问题的最好办法就是自己主动去学习机器人,去掌握一门机器人无法代替得技术。那么从今天开始就跟着我一起来学习工业机器人如何使用吧!(本教程以库卡机器人为说明对象)
下面开始我们的第一章学习内容:
一、KUKA库卡机器人系统的结构和功能
1.1机器人介绍 问:什么是机器人?
答:机器人Roboter这个概念源于斯拉夫语中的字“robota”,是“重活”的意思
工业机器人这个词的官方定义为: “ 机器人是一种可自由编程并受程序控制的操作机。”
控制系统、操作设备以及连接电缆和软件也同样属于机器人的范畴。

工业机器人
1 控制系统 (控制柜 (V)KR C4)2 机械手 (机器人机械系统)3 手持操作和编程器 (库卡 smartPAD)
所有不包括在工业机器人系统内的设备被称为外围设备,它们是:
n 工具 (效应器 /Tool)
n 保护装置
n 皮带输送机
n 传感器
n 等等
1.1、库卡机器人的机械系统:问:什么是机械手?
答:机械手是机器人机械系统主体。 它由众多活动的、相互连接在一起的关节(轴)组成。 我们也称之为运动链。
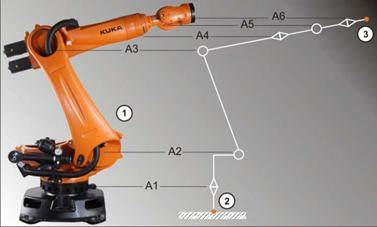
机械手
1 机械手 (机器人机械系统)
2 运动链的起点: 机器人足部 (ROBROOT)
3 运动链的开放端: 法兰 (FLANGE)
4、A1... A6:机器人轴 1 至 轴6
各根轴的运动通过伺服电机有针对性的调控而实现。这些伺服电机通过减速器与机械手的各部件相连。

机器人的机械零部件概览
1、底座 2、转盘 3 、平衡配重4、连杆臂5、手臂 6、手
机器人机械系统的部件主要由铸铝和铸钢制成。 在个别情况下也使用碳纤维部件。
各根轴从下 (机器人的足部)到上 (机器人法兰)编号:

库卡机器人自由度
以下是库卡产品系列中机械手的技术数据选摘
n 轴数:4 (SCARA 机器人和平行四边形机器人)至 6 (标准垂直折臂机器人)
n 作用范围: 从 0.35m (KR 5 scara) 直至 3.9 m (KR 120 R3900 ultra K)
n 自重:从 20 kg 直至 4700 kg
n 精确度:0.015 mm 至 0.2 mm 重复精度。
1.3 机器人控制系统 (V)KR C4 问:谁控制机器人的运动?
答:机器人机械系统由伺服电机控制运动,而该电机则由 (V)KR C4 控制系统控制。
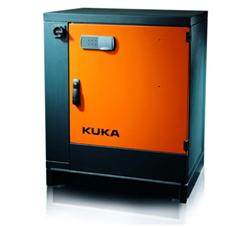
控制系统 (V)KR C4
(V)KR C4 控制系统的属性
n 机器人控制系统 (轨迹规划): 控制六个机器人轴以及最多两个附加的外部轴。

(V)KR C4 轴调节器
n 流程控制系统:符合 IEC61131 标准的集成式 Soft PLC
n 安全控制系统
n 运动控制系统
n 通过总线系统 (例如:ProfiNet、以太网 IP、Interbus)的通讯可能性:
n 可编程控制器 (PLC)
n 其它控制系统
n 传感器和执行器
n 通过网络的通讯可能性:
n 主机
n 其它控制系统

(V)KR C4 的通讯途径
1.4 KUKA smartPAD问:如何操作库卡机器人?
答:KUKA 机器人的操作通过手持操作器 (即 KUKA smartPAD)进行。
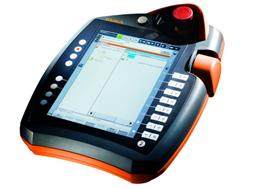
KUKA smartPAD
KUKA smartPAD 的特点:
n 触摸屏 (触摸式操作界面),用手或配备的触摸笔操作
n 大尺寸竖型显示屏
n KUKA 菜单键
n 八个移动键
n 操作工艺数据包的按键
n 用于程序运行的按键 (停止 / 向前 / 向后)
n 显示键盘的按键
n 更换运行方式的钥匙开关
n 紧急停止按键
n 3D 鼠标
n 可拔出
n USB 接口
1.5 smartPAD 概览

1、用于拔下smartPAD的按钮
2、用于调出连接管理器的钥匙开关。 只有当钥匙插入时,方可转动开关。(可以通过连接管理器切换运行模式)
3、紧急停止键。用于在危险情况下关停机器人,紧急停止键在被按下时将自行闭锁。
4、3D鼠标,用于手动移动机器人。
5、轴操作键,用于手动移动机器人。
6、用于设定程序倍率的按键(即机器人在执行程序时的运动速度)
7、用于设定手动被倍率的按键(即手动操作机器人时机器人的运动速度)
8、主菜单按键,用来在显示屏上将主菜单调出来。
9、工艺键,工艺键主要用于设定工艺程序包中的参数。 当安装的工艺程序包不同时,按键也会有不同作用。
10、启动键,用于手动启动机器人程序。
11、逆向启动键。 用逆向启动键可逆向启动一个程序。 程序将逐步运行。
12、停止键,用于停止正在运行的程序。
13、键盘按键显示键盘。 通过此按键可在需要时在显示屏上调出软键盘,通常情况下不比显示。
1.6 机器人编程
通过机器人编程可保证运动过程和流程将自动完成并始终可反复。 为此,控制
器需要大量的信息:
n 机器人位置 = 工具的空间位置
n 动作类型
n 速度 / 加速
n 等候条件、分支、相关性等信号信息
问:控制器使用哪种语言?
答:编程语言是 KRL - KUKA Robot Language (库卡机器人编程语言)。
程序举例:

问:库卡机器人如何编程?
答:KUKA 机器人可用不同的编程方法编程:
n 以示教 (Teach-in) 法在线编程。
n 离线编程
n 图形辅助的互动编程:模拟机器人过程
n 文字编程:借助于 smartPAD 界面在上级操作 PC 上的显示编程 (也适用于诊断、在线适配调整已运行的程序)
1.7 机器人安全性
机器人必须在足够安全的情况下才可以使用,这就需要机器人系统装备相应的安全设备。
例如:隔离性防护装置 (防护栅、门等等)、紧急停止按键、失知制动装置、轴范围限制置等等。
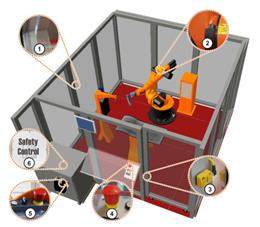
安全设备
1、防护栅
2、轴 1、2 和 3 的机械终端止挡或者轴范围限制装置
3、防护门及具有关闭功能监控的门触点
4、紧急停止按钮 (外部)
5、紧急停止按钮、确认键、调用连接管理器的钥匙开关
6、内置的 (V)KR C4 安全控制器



